
{kind=link}
Chapter 4 Dynamics Programming
“Reinforcement Learning: An Introduction” by Richard Sutton & Andrew Barto, 2nd Ed
Author: Charles Zhang
All Notes Catelog for Reinforcement Learning: An Introduction. This post is created following BY-NC-ND 4.0 agreement, please follow terms while sharing.
Policy Evaluation¶
Idea: \(\displaystyle \lim_{k\rightarrow\infty} v_k = v_\pi\). From the Bellman equation for value function \(v(s)\) in last chapter, there are \(n\) linear equations with \(n\) states, \(v_{k+1} = \boldsymbol{C}\cdot v_k + \boldsymbol{b}\) where \(\boldsymbol{C}\text{ is } n\times n \) matrix of coefficients of \(v_k\) and \( \boldsymbol{b} \text{ is a } n \text{ vector for constants in Bellman equation}\). Therefore, it could be solved using Jacobi, or Gauss-Seidel iterate method, or other numerical techiniques. And this iteration would coverage if and only if \(\displaystyle\lim_{k\rightarrow\infty} C^k = \text{zero matrix }\boldsymbol{O}\). To prove, let
\( \boldsymbol{C}=\left[\begin{array}{cccc} c_{11} & c_{12} & \cdots & c_{1 n} \\ c_{21} & c_{22} & \cdots & c_{2 n} \\ \vdots & \vdots & \ddots & \vdots \\ c_{n 1} & c_{n 2} & \cdots & c_{n n} \end{array}\right], \text{ and } \boldsymbol{b}=\left[\begin{array}{c} b_{1} \\ b_{2} \\ \vdots \\ b_{n} \end{array}\right] \)
where from the bellman equation,
\( \begin{aligned} c_{i j} &=\sum_{a} \pi\left(a | s_{i}\right) \sum_{r} p\left(s_{j}, r | s_{i}, a\right) \gamma \\ & \leq \sum_{a} \pi\left(a | s_{i}\right) \sum_{s_{j}, r} p\left(s_{j}, r | s_{i}, a\right) \gamma\\ &= \gamma\\ b_{i} &=\sum_{a} \pi\left(a | s_{i}\right) \sum_{r} p\left(r | s_{i}, a\right) r \end{aligned} \)
Therefore, when \(\gamma \in [0,1)\),
\(\lim _{k \rightarrow \infty} \boldsymbol{C}^{k} \leq \lim _{k \rightarrow \infty}\left[\begin{array}{cccc} \gamma & \gamma & \cdots & \gamma \\ \gamma & \gamma & \cdots & \gamma \\ \vdots & \vdots & \ddots & \vdots \\ \gamma & \gamma & \cdots & \gamma \end{array}\right]^{k}=\boldsymbol{O}\)
The DP algorith:

Policy Improvement¶
Idea: using greedy \(\pi'(s), \pi(s)\in\mathcal{A}\), \(q_\pi (s,\pi'(s)) \geq v_\pi(s) \Rightarrow v_{\pi'}(s)\geq v_\pi(s)\)
Proof:
\(\begin{aligned} q_{\pi}(s, a) & \doteq \mathbb{E}_{\pi}\left[G_{t} \mid S_{t}=s, A_{t}=a\right]=\mathbb{E}_{\pi}\left[R_{t+1}+\gamma v_{\pi}(s) \mid s, a\right] \\ v_{\pi}(s) & \leq q_{\pi}\left(s, \pi^{\prime}(s)\right) \\ &=\mathbb{E}_{\pi}\left[R_{t+1}+\gamma v_{\pi}\left(S_{t+1}\right) \mid S_{t}=s, A_{t}=\pi^{\prime}(s)\right] \\ &=\mathbb{E}_{\pi^{\prime}}\left[R_{t+1}+\gamma v_{\pi}\left(S_{t+1}\right) \mid S_{t}=s\right] \\ & \leq \mathbb{E}_{\pi^{\prime}}\left[R_{t+1}+\gamma q_{\pi}\left(S_{t+1}, \pi^{\prime}\left(S_{t+1}\right)\right) \mid S_{t}=s\right] \\ &=\mathbb{E}_{\pi^{\prime}}\left[R_{t+1}+\gamma \mathbb{E}_{\pi^{\prime}}\left[R_{t+2}+\gamma v_{\pi}\left(S_{t+2}\right)\right] \mid S_{t}=s\right] \\ &=\mathbb{E}_{\pi^{\prime}}\left[R_{t+1}+\gamma R_{t+2}+\gamma^{2} v_{\pi}\left(S_{t+2}\right) \mid S_{t}=s\right] \\ & \leq \mathbb{E}_{\pi^{\prime}}\left[R_{t+1}+\gamma R_{t+2}+\gamma^{2} R_{t+3}+\gamma^{3} v_{\pi}\left(S_{t+3}\right) \mid S_{t}=s\right] \\ \vdots & \\ & \leq \mathbb{E}_{\pi^{\prime}}\left[R_{t+1}+\gamma R_{t+2}+\gamma^{2} R_{t+3}+\gamma^{3} R_{t+4}+\cdots \mid S_{t}=s\right] \\ &=\mathbb{E}_{\pi^{\prime}}\left[G_{t} \mid S_{t}=s\right] \\ &=v_{\pi^{\prime}}(s) \end{aligned}\)
And the equation for updating new greedy policy \(\pi'\): \[ \begin{aligned} \pi^{\prime}(s) & \doteq \underset{a}{\arg \max } q_{\pi}(s, a) \\ &=\underset{a}{\arg \max } \mathbb{E}\left[R_{t+1}+\gamma v_{\pi}\left(S_{t+1}\right) \mid S_{t}=s, A_{t}=a\right] \\ &=\underset{a}{\arg \max } \sum_{s^{\prime}, r} p\left(s^{\prime}, r \mid s, a\right)\left[r+\gamma v_{\pi}\left(s^{\prime}\right)\right] \end{aligned} \]
Policy Iteration¶
Idea: \(\pi_0 \xrightarrow{E} v_{\pi_0} \xrightarrow{I} \pi_1 \xrightarrow{E} v_{\pi_1} \xrightarrow{I} \pi_2 \xrightarrow{E} ... \xrightarrow{I} \pi_* \xrightarrow{E} v_* \), where \(\xrightarrow{E}\) is policy evaluation and \(\xrightarrow{I}\) is policy improvement.
The DP algorithm below illustrates this iteration directly:

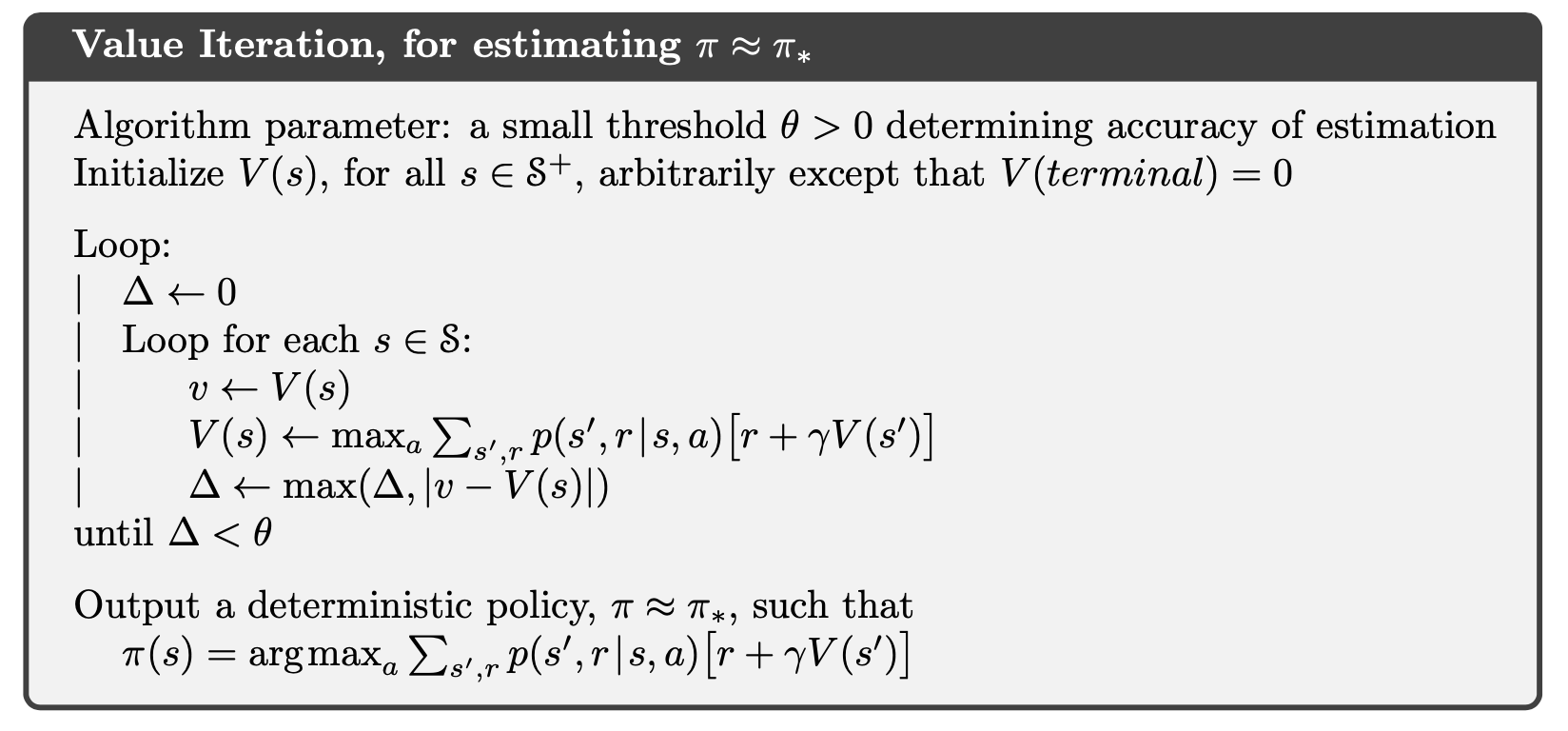
Value Iteration¶
Idea: update operation that combines the policy improvement and truncated policy evaluation steps:
\(\begin{aligned} v_{k+1}(s) & \doteq \max _{a} \mathbb{E}\left[R_{t+1}+\gamma v_{k}\left(S_{t+1}\right) \mid S_{t}=s, A_{t}=a\right] \\ &=\max _{a} \sum_{s^{\prime}, r} p\left(s^{\prime}, r \mid s, a\right)\left[r+\gamma v_{k}\left(s^{\prime}\right)\right], \text{ }\forall s\in\mathcal{S} \end{aligned}\)
As for arbitrary \(v_0\), \(\{v_k\}\) is shown to be guaranteed to converge to \(v_*\) by the bellman equation illustrated last chapter. The DP algorithm below follows this update:
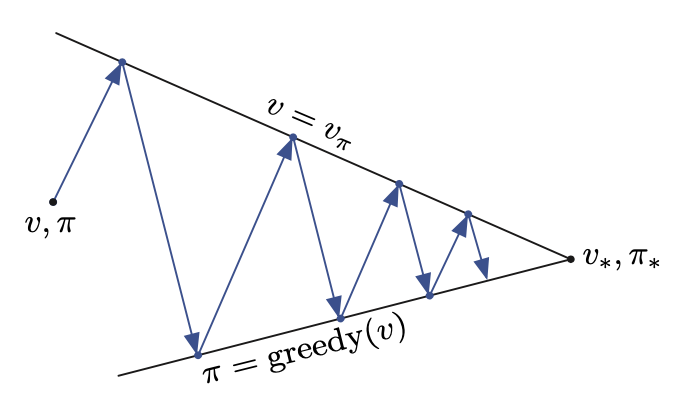
Generalized Policy Iteration (GPI)¶
Important model in reinforcement learnig. e.g. policy-evaluation and policy-improvement processes.
The process and convergence is clearly illustrated in the figure below:
Implementation of Stochastic GridWorld¶
This also shown in my MDP note.

Using Bellman Optimality Equation: $v*(s) = \max_a \{\sum_{s',r} p(s', r\mid s, a)\cdot [r + \gamma \cdot v(s')]\} = \max q_{\pi*}(s, a)$

The explanations, use of equations, and details for implementation are all detailed commented in the code below.
"""
--------------------------
Environment
c 0 1 2 3
r - - - - - - - - - -
0 | | | | +1 |
- - - - - - - - - -
1 | |WALL| | -1 |
- - - - - - - - - -
2 | | | | |
- - - - - - - - - -
For Visualization:
- - - - - - - - - -
3 | | | | +1 |
- - - - - - - - - -
2 | |WALL| | -1 |
- - - - - - - - - -
1 | | | | |
r - - - - - - - - - -
c 1 2 3 4
@author: Charles Zhang
@date Mar 28, 2021
---------------------------
"""
import numpy as np
from matplotlib.table import Table
import matplotlib.pyplot as plt
# Grid Environment for MDP Value Iteration
class GridWorldEnv:
EXIT = (float("inf"), float("inf"))
# actions
NORTH = (-1, 0)
EAST = (0, 1)
SOUTH = (1, 0)
WEST = (0, -1)
ACTIONS = [NORTH, EAST, SOUTH, WEST]
index = {NORTH: 0, EAST: 1, SOUTH: 2, WEST: 3, EXIT: -1}
GAMEOVER = (-1, -1) # by convenience, the next state of terminals is (-1, -1)
def __init__(self, shape, prob, walls, terminals, alive_reward=0.0):
"""
:param shape: shape of gridworld: (row, col)
:param prob: probability to go north(for stochastic move)
:param walls: list of walls: [(1, 1)] if only one wall at (1, 1)
:param terminals: dictionary of goal and death terminal states with reward
{(0, 3): +1, (1, 3): -1} in this problem
:param alive_reward: alive reward
"""
self.rows, self.cols = shape
p_not_north = (1 - prob) / 2
self.turns = {-1: p_not_north, 0: prob, 1: p_not_north} # turn west, north, or east
self.walls = set(walls)
self.terminals = terminals
self.alive_reward = alive_reward
def getStates(self):
"""
All available states(all states except wall(s))
"""
return [(i, j) for i in range(self.rows)
for j in range(self.cols) if (i, j) not in self.walls]
def getTransitionStatesAndProbs(self, state, action):
"""
get all (next state, p(s' | s, a)), in terms of stochastic action
:return: list of (next_state, probability to the next state given current state and action)
"""
if state in self.terminals:
# if the state is terminal state, the probability of game over is 1
return [(GridWorldEnv.GAMEOVER, 1.0)]
result = []
for turn in self.turns: # loop over all turns(west, north, east)
# turn west, north, or east of the "planned" action for the "real" action
# -1, 0, 1, or 2 % 4 to get the "real" tuple of direction(action), e.g.:
# planned: EAST, index 1 => turn is WEST(of EAST), index -1 => 1 + -1 = 0 => mod 4 => 0: real action NORTH
# => turn is NORTH(of EAST), index 0 => 1 + 0 = 1 => mod 4 => 1: real action EAST
direction = GridWorldEnv.ACTIONS[(GridWorldEnv.index[action] + turn) % len(GridWorldEnv.ACTIONS)]
row = state[0] + direction[0] # x coordinate of next state
col = state[1] + direction[1] # y coordinate of next state
next_state = (row if 0 <= row < self.rows else state[0],
col if 0 <= col < self.cols else state[1]) # possible next state considered wall(s)
if next_state in self.walls: # stay if is wall
next_state = state
prob = self.turns[turn]
result.append((next_state, prob))
return result
def getReward(self, state, action, nextState):
"""
r(s, a, s')
"""
if state in self.terminals:
return self.terminals[state] # get reward(penalty) for terminal states
else:
return self.alive_reward # alive exploration rewards
@staticmethod
def isTerminal(next_state):
"""
check if next state is terminal state, and by convenience, the next state of terminals is (-1, -1)
"""
return next_state == GridWorldEnv.GAMEOVER
def getLegalActions(self, state):
"""
get all possible actions, if state the terminal, by convenience return (INF, INF)
"""
if state in self.terminals:
return [GridWorldEnv.EXIT]
else:
return GridWorldEnv.ACTIONS
def to_2d_array(self, in_list, add=None):
"""
input list to 2D array(matrix) based on rows and columns
"""
mat = []
k = False
for i in range(self.rows):
temp = []
for j in range(self.cols):
if add is not None:
if (i, j) in self.walls:
temp.append(add)
k = True
continue
if k:
temp.append(in_list[i * self.cols + j - 1])
else:
temp.append(in_list[i * self.cols + j])
mat.append(temp)
return mat
def printValues(self, values):
"""
visualize values in a table
"""
fig, ax = plt.subplots()
ax.set_axis_off()
tb = Table(ax, bbox=[0, 0, 1, 1])
values = list(values.values())
values = np.round(np.array(self.to_2d_array(values, add=0)), decimals=2)
width, height = 1.0 / self.rows, 1.0 / self.cols
# Add cells
for (i, j), val in np.ndenumerate(values):
tb.add_cell(i, j, width, height, text=val,
loc='center', facecolor='white')
# Row and column labels...
n = max(self.rows, self.cols)
for i in range(n):
if i < self.rows:
tb.add_cell(i, -1, width, height, text=self.rows-i, loc='right',
edgecolor='none', facecolor='none')
if i < self.cols:
tb.add_cell(self.rows, i, width, height / 2, text=i+1, loc='center',
edgecolor='none', facecolor='none')
tb.set_fontsize(13)
ax.add_table(tb)
plt.plot()
def printQValues(self, q_values):
fig, ax = plt.subplots()
ax.set_axis_off()
tb = Table(ax, bbox=[0, 0, 1, 1])
width, height = 1.0 / self.rows, 1.0 / self.cols
qs = []
for i in range(self.rows):
for j in range(self.cols):
q = ''
if (i, j) in self.walls or (i, j) in list(self.terminals.keys()):
q += " \n"
else:
q += " %.2f \n" % (q_values[(i, j), GridWorldEnv.NORTH])
if (i, j) in self.walls:
q += " \n"
elif (i, j) in self.terminals:
q += " %.2f \n" % q_values[(i, j), GridWorldEnv.EXIT]
else:
q += "%.2f %.2f\n" % (q_values[(i, j), GridWorldEnv.WEST], q_values[(i, j), GridWorldEnv.EAST])
if (i, j) in self.walls or (i, j) in list(self.terminals.keys()):
q += " "
else:
q += " %.2f " % (q_values[(i, j), GridWorldEnv.SOUTH])
qs.append(q)
qs = self.to_2d_array(qs)
qs = np.array(qs)
for (i, j), q in np.ndenumerate(qs):
tb.add_cell(i, j, width, height, text=q,
loc='center', facecolor='white')
n = max(self.rows, self.cols)
for i in range(n):
if i < self.rows:
tb.add_cell(i, -1, width, height, text=self.rows - i, loc='right',
edgecolor='none', facecolor='none')
if i < self.cols:
tb.add_cell(self.rows, i, width, height / 2, text=i + 1, loc='center',
edgecolor='none', facecolor='none')
tb.set_fontsize(15)
ax.add_table(tb)
plt.plot()
def printPolicy(self, policy):
action_map = {0: '↑', 1: '→',
2: '↓', 3: '←',
-1: ' '}
policy = list(policy.values())
policy = self.to_2d_array(policy, add=-1)
policy = np.array(policy, dtype=object)
fig, ax = plt.subplots()
ax.set_axis_off()
tb = Table(ax, bbox=[0, 0, 1, 1])
width, height = 1.0 / self.rows, 1.0 / self.cols
for (i, j), action in np.ndenumerate(policy):
if (i, j) in self.walls:
tb.add_cell(i, j, width, height, text='',
loc='center', facecolor='gray')
elif (i, j) == list(self.terminals.keys())[0]:
tb.add_cell(i, j, width, height, text='+1',
loc='center', facecolor='blue')
elif (i, j) == list(self.terminals.keys())[1]:
tb.add_cell(i, j, width, height, text='-1',
loc='center', facecolor='red')
else:
tb.add_cell(i, j, width, height, text=action_map[action],
loc='center', facecolor='white')
n = max(self.rows, self.cols)
for i in range(n):
if i < self.rows:
tb.add_cell(i, -1, width, height, text=self.rows - i, loc='right',
edgecolor='none', facecolor='none')
if i < self.cols:
tb.add_cell(self.rows, i, width, height / 2, text=i + 1, loc='center',
edgecolor='none', facecolor='none')
tb.set_fontsize(13)
ax.add_table(tb)
plt.plot()
"""
--------------------------------------------------------------------------------------
Bellman Equation:
v(s) = Σ_{a} π(a | s) Σ_{s', r} p(s', r | s, a) * [r + γ * v(s')]
Bellman Optimality Equation:
v*(s) = max_{a} { Σ p(s', r | s, a) * [r + γ * v(s')] }
= max q_{π*} (s, a) = max q(s, a), as π(a | s) is unchanged in this MDP problem
@author: Charles Zhang
@date Mar 28, 2021
--------------------------------------------------------------------------------------
"""
from collections import defaultdict
# MDP Value Iteration with Bellman update
class ValueIteration:
"""
Class to Find Optimal Value Functions
"""
def valueIteration(self, GridWorld, discount=0.9, iterations=100):
"""
Implement the value iteration algorithm by the optimal value function derived by Bellman equation
v*(s) = max q(s, a)
:param GridWorld: gridworld environment
:param discount: discount gamma
:param iterations: iteration times
:return dictionary of values of all states
"""
values = defaultdict(lambda: 0) # initialize values with all 0 of states
for i in range(iterations): # or while TRUE:
vnext = defaultdict(lambda: 0) # initialize values for each iteration with all 0 of states
for state in GridWorld.getStates(): # loop over all possible state(all states except wall(s))
if not GridWorld.isTerminal(state): # check if the state is terminal
maximum = float("-inf")
for action in GridWorld.getLegalActions(state): # loop over all possible actions
q_value = self.get_q_from_v(GridWorld, state, action, values, discount)
maximum = max(maximum, q_value) # update the max q value among actions of current state
vnext[state] = maximum # optimal v*(s) = max q(s, a)
values = vnext # update the new value table
# if while TURE above, here could compare the difference between
# values and vnext to see if converges, and end the loop
return values
@staticmethod
def get_q_from_v(GridWorld, state, action, values, discount=0.9):
"""
get q(s, a) from values v(s) and action a by
Bellman Equation: q(s, a) = Σ p(s', r | s, a) * [r + γ * v(s')]
:param GridWorld: gridworld environment
:param state: current state s
:param action: current selected action a
:param values: current values table
:param discount: discount gamma
:return: float q(s, a)
"""
q_val = 0
# implement Bellman equation: q(s, a) = Σ p(s', r | s, a) * [r + γ * v(s')]
for next_state, prob in GridWorld.getTransitionStatesAndProbs(state, action):
q_val += prob * (GridWorld.getReward(state, action, next_state) + discount * values[next_state])
return q_val
def getQValues(self, GridWorld, values, discount=0.9):
"""
Get q values by Values
:return dictionary of q values of all states
"""
q_values = {}
for state in GridWorld.getStates():
if not GridWorld.isTerminal(state):
for action in GridWorld.getLegalActions(state):
q_values[state, action] = self.get_q_from_v(GridWorld, state, action, values, discount)
return q_values
def getPolicy(self, GridWorld, values, discount=0.9):
"""
get policy by values
π*(s) ≈ π(s) = argmax_a Σ p(s', r | s, a) * [r + γ * v(s')] = argmax_a q(s, a)
:return dictionary of optimal actions of all states
"""
policy = {}
for state in GridWorld.getStates():
if not GridWorld.isTerminal(state):
maximum = -float("inf")
best_action = None
# Choose action for the policy based no the max q values among actions of state s
for action in GridWorld.getLegalActions(state):
q_value = self.get_q_from_v(GridWorld, state, action, values, discount)
if q_value > maximum:
maximum = q_value
best_action = action
best_action = GridWorld.index[best_action]
policy[state] = best_action
return policy
No Alive Reward (discount reward $\gamma = 0.9$)¶
gamma = 0.9
alive_reward = 0.0
print("GridWorld Value Iteration with alive reward = %.2f, discount gamma = %.2f\n" % (alive_reward, gamma))
terminals = {(0, 3): 1, (1, 3): -1}
gridworld0 = GridWorldEnv(shape=(3, 4), prob=0.8, walls=[(1, 1)], terminals=terminals, alive_reward=0.0)
vi = ValueIteration()
values = vi.valueIteration(GridWorld=gridworld0, discount=gamma)
gridworld0.printValues(values)

q_values = vi.getQValues(GridWorld=gridworld0, values=values, discount=gamma)
gridworld0.printQValues(q_values)

policy = vi.getPolicy(GridWorld=gridworld0, values=values, discount=gamma)
gridworld0.printPolicy(policy)

With Alive Reward ($\gamma = 1$)¶
reward = -0.01
print("Grid world Value Iteration with alive rewards = %.2f\n" % reward)
gridworld001 = GridWorldEnv((3, 4), 0.8, [(1, 1)], terminals, reward)
values = vi.valueIteration(gridworld001, 1, 100)
gridworld001.printValues(values)
# q_values = vi.getQValues(gridworld001, values, 1)
# gridworld001.printQValues(q_values)

policy = vi.getPolicy(gridworld001, values, 1)
gridworld001.printPolicy(policy)

reward = -0.03
print("Grid world Value Iteration with alive rewards = %.2f\n" % reward)
gridworld003 = GridWorldEnv((3, 4), 0.8, [(1, 1)], terminals, reward)
values = vi.valueIteration(gridworld003, 1, 100)
gridworld003.printValues(values)
# q_values = vi.getQValues(gridworld003, values, 1)
# gridworld003.printQValues(q_values)

policy = vi.getPolicy(gridworld003, values, 1)
gridworld003.printPolicy(policy)

reward = -0.4
print("Grid World with additive rewards = %.2f\n" % reward)
gridworld04 = GridWorldEnv((3, 4), 0.8, [(1, 1)], terminals, reward)
values = vi.valueIteration(gridworld04, 1, 100)
gridworld04.printValues(values)
# q_values = vi.getQValues(gridworld04, values, 1)
# gridworld04.printQValues(q_values)

policy = vi.getPolicy(gridworld04, values, 1)
gridworld04.printPolicy(policy)

reward = -2
print("Grid World with additive rewards = %.2f\n" % reward)
gridworld2 = GridWorldEnv((3, 4), 0.8, [(1, 1)], terminals, reward)
values = vi.valueIteration(gridworld2, 1, 100)
gridworld2.printValues(values)
# q_values = vi.getQValues(gridworld2, values, 1)
# gridworld2.printQValues(q_values)

policy = vi.getPolicy(gridworld2, values, 1)
gridworld2.printPolicy(policy)

Reference
[1] Sutton, Richard S., and Andrew G. Barto. Reinforcement learning: An introduction. MIT press, 2018.
[2] Sauer, Timothy. Numerical analysis. Pearson, 2018.
[3] https://github.com/ShangtongZhang/reinforcement-learning-an-introduction